





Soleil, sable et sécurité au travail
- Actualités
- Erschienen bei Pepperl+Fuchs
Comment hyCLEANER associe des résultats propres et une sécurité maximale
Pepperl + Fuchs, pionnier et innovateur dans le domaine de la protection électrique contre les explosions et de la technologie des capteurs, évoque dans son article « Soleil, sable et sécurité » le produit solarROBOT pro de hyCLEANER et l’utilisation de sa technologie de capteurs à ultrasons.
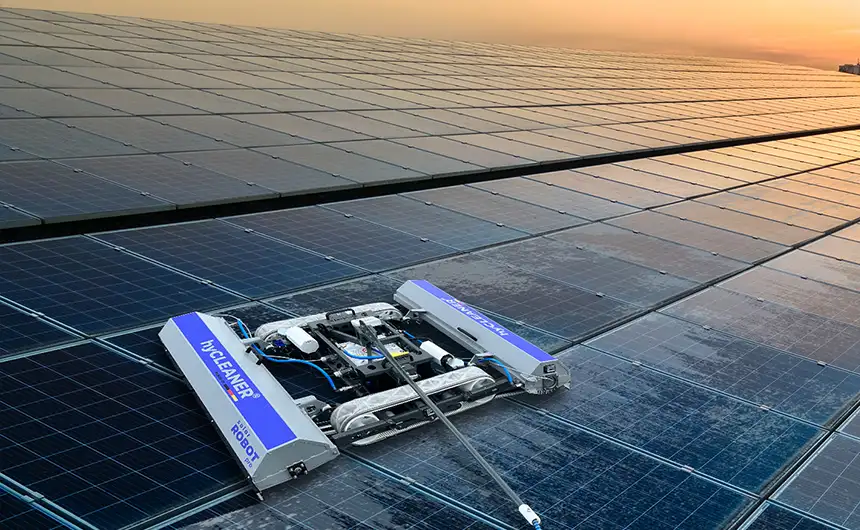
Ce qu’un robot aspirateur fait depuis longtemps à la maison, hyCLEANER le réalise avec le solarROBOT pro sur les grandes installations photovoltaïques sur le toit ou en plein champ : La machine de nettoyage partiellement automatisée débarrasse les panneaux solaires de la saleté de manière fiable, favorisant ainsi le rendement énergétique et la longévité des installations. La technologie de capteurs à ultrasons de Pepperl+Fuchs joue un rôle décisif en matière de sécurité.
« Le travail sur des surfaces vitrées glissantes avec certains angles d’inclinaison ou sur des toits élevés comporte toujours un certain risque pour l’homme », explique Kneiber. « Avec notre robot de nettoyage, l’opérateur reste dans un environnement sûr, tandis que le solarROBOT pro effectue le travail. »
Le solarROBOT pro peut être commandé via une télécommande radio. La fonction AutoDrive avec régulateur de vitesse et assistant de maintien de voie rend l’opération particulièrement confortable – le robot se déplace automatiquement sur la surface sans que l’opérateur n’ait à le contrôler en permanence. Cependant, pour protéger la machine elle-même d’une chute au bord et ainsi éviter les accidents et les dommages, hyCLEANER a équipé le robot de nettoyage des capteurs à ultrasons particulièrement compacts et précis de la série F77 de Pepperl+Fuchs.
« Un capteur à ultrasons est installé à chacun des quatre coins du solarROBOT, orienté vers le bas et enregistrant en permanence la surface des panneaux solaires », explique Jan Schirweit, ingénieur commercial chez Pepperl+Fuchs. « Si l’un des capteurs détecte qu’il n’y a plus d’objet dans sa zone de détection, c’est-à-dire que la surface se termine, la machine s’arrête automatiquement et émet un signal sonore au personnel de commande ». La personne qui commande a alors la possibilité de désactiver l’arrêt automatique et de laisser le robot continuer à rouler, par exemple s’il ne s’agit que d’un interstice, ou de le faire tourner.
