





Sol, arena y seguridad laboral
- Noticias
- Erschienen bei Pepperl+Fuchs
Cómo hyCLEANER combina resultados limpios y máxima seguridad
Pepperl + Fuchs, pionero e innovador en protección contra explosiones eléctricas y sensorización, informa en su artículo «Sol, arena y seguridad» sobre el producto solarROBOT pro de hyCLEANER y el uso de su sensorización por ultrasonidos.
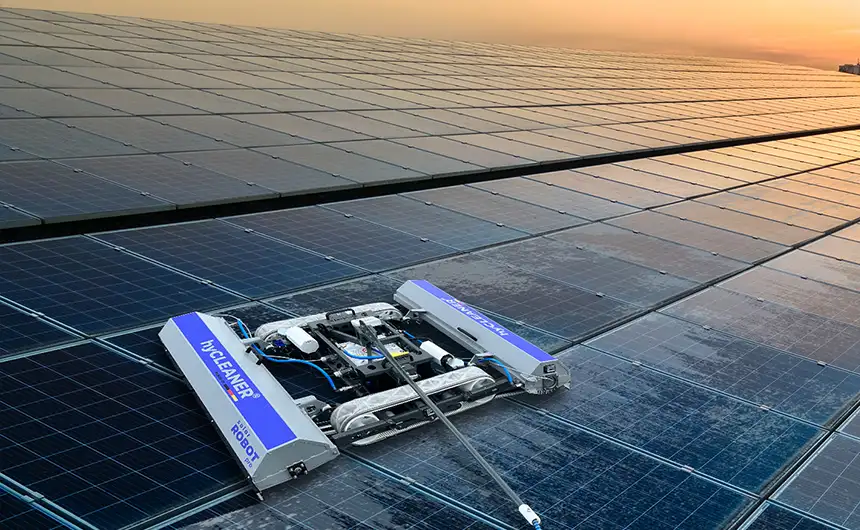
Lo que un robot aspirador hace en casa desde hace tiempo, hyCLEANER lo lleva con el solarROBOT pro a grandes plantas fotovoltaicas en tejados o a campo abierto: La máquina de limpieza semiautomática libera de forma fiable los paneles solares de la suciedad, promoviendo así el rendimiento energético y la longevidad de las instalaciones. Un papel decisivo en términos de seguridad lo juega la sensorización por ultrasonidos de Pepperl+Fuchs.
“Trabajar sobre superficies de vidrio resbaladizas con determinados ángulos de inclinación o en tejados altos siempre conlleva cierto riesgo para las personas”, explica Kneiber. “Con nuestro robot de limpieza, la persona permanece en un entorno seguro mientras el solarROBOT pro realiza el trabajo”.
El solarROBOT pro se puede manejar mediante un mando a distancia por radio. La función AutoDrive con control de crucero y asistente de mantenimiento de carril lo hace especialmente cómodo: el robot se desplaza automáticamente por la superficie sin que el operario tenga que controlarlo de forma continua. Para proteger también a la propia máquina de una caída en un borde y, con ello, evitar accidentes y daños, hyCLEANER ha equipado el robot de limpieza con los sensores ultrasónicos especialmente compactos y precisos de la serie F77 de Pepperl+Fuchs.
«En cada una de las cuatro esquinas del solarROBOT se instala un sensor de ultrasonidos que mira hacia abajo y registra constantemente la superficie de los paneles solares», explica Jan Schirweit, ingeniero de ventas de Pepperl+Fuchs. «Si uno de los sensores detecta que ya no hay ningún objeto en su área de detección, es decir, que la superficie termina, la máquina se detiene automáticamente y emite una señal acústica al personal operativo». La persona que lo maneja tiene entonces la posibilidad de anular la parada automática y dejar que el robot continúe, por ejemplo, si se trata solo de una grieta, o hacer que gire.
